Během posledních třiceti let se adaptivní optika proměnila z vysoce sofistikované, nákladné a utajované technologie v běžnou součást pozemských teleskopů, mikroskopů, laserových systémů či nastupujících systémů pro satelitní komunikaci. Podívejme se zblízka na technologie, které byly pro její účely vyvinuty a stojí za jejím úspěchem.

Tento článek vyšel v čísle 5/2020 Československého časopisu pro fyziku, vydávaného Fyzikálním ústavem Akademie věd ČR. Autorem je Jan Pilař z laserového centra HiLASE (FZU AV ČR).
Adaptivní optika v kostce
Adaptivní optikou je označován elektrooptický systém určený k řízenému ovládání fáze optické vlny. Fáze optické vlny či svazku ovlivňuje zásadním způsobem kvalitu zobrazení a její účinné řízení umožňuje překonat vnější vlivy, které toto zobrazení ruší. Ve své původní podobě byla myšlenka adaptivního řízení fáze optické vlny navržena astronomy pro odstranění vlivu turbulentní atmosféry, což se, po necelém půl století vývoje, do značné míry podařilo. V současnosti tato technologie úspěšně proniká do mnoha dalších oborů a umožňuje řádově lepší výsledky všude tam, kde je potřeba přesné zobrazování. Jedná se zejména o oblasti laserové techniky, mikroskopie a optické komunikace, ale postupně se přidávají i další oblasti, jako je například oftalmologie či systémy pohonu založené na koherentní kombinaci laserových svazků.
Jelikož myšlenka adaptivní optiky původně vzešla z astronomické komunity [1], vyjdeme při jejím popisu z příkladu astronomického pozorování. V astronomii je světlo hvězdy přicházející z vesmíru v důsledku obrovské vzdálenosti jeho zdroje v podstatě rovinnou elektromagnetickou vlnou s neporušenou vlnoplochou (prostorovou fází). Průchodem atmosférou je však tato rovinnost porušena a do vlny jsou vneseny tzv. aberace neboli fázové odchylky od jejího rovinného tvaru. Velikost těchto odchylek je typicky v řádu několika málo vlnových délek viditelného světla neboli několika mikrometrů. Důsledkem těchto jemných poruch však je, že při zobrazení teleskopem je světlo soustředěno na větší oblast obrazové roviny (CCD čip), než kdyby bylo bez poruch, a obraz se proto jeví rozmazaný. Tyto aberace se navíc velice rychle mění, jak se v atmosféře turbulentně mísí teplý a studený vzduch. Jednoduché schéma principu adaptivně optického systému pro korekci optických aberací je na obrázku 1.

Obr. 1 Schéma principu uzavřené smyčky adaptivní optiky. Část příchozího světla je vydělena pro senzor vlnoplochy, který měří aberace svazku a tuto informaci předává řídicímu prvku, který následně upraví korektor vlnoplochy tak, aby zjištěné aberace vlnoplochy opravil. Celý proces se iterativně opakuje, zpřesňuje a reaguje na změny aberací v čase. Opravený svazek je následně zobrazen na vědecké zařízení (CCD čip, spektrometr apod.) a dosahuje typicky řádově lepších rozlišení, než kdyby opravený nebyl.
Metoda adaptivní optiky předpokládá užití optického prvku schopného adaptivně ovlivňovat vlnoplochu optické vlny, takzvaného korektoru vlnoplochy (v tomto případě se jedná o deformovatelné zrcadlo, které bude popsáno dále). Tento korektor musí být možné ovládat elektronicky tak, aby jej bylo možné přizpůsobit konkrétnímu případu optických vad korigované optické vlny v daný okamžik. Měření těchto optických vad je realizováno pomocí senzoru vlnoplochy a tato měření jsou následně zpracována řídicím systémem, který generuje řídicí signál pro korektor vlnoplochy. Ten zajistí kompenzaci zjištěných aberací a celý proces se neustále opakuje a iterativně se tak zpřesňuje kvalita opravy aberací, přičemž systém zároveň reaguje na jejich dynamické změny. Hovoříme o uzavřené smyčce či smyčce se zpětnou vazbou. Pro případ kompenzace atmosférických turbulencí musejí být opakovací frekvence adaptivní smyčky v řádu stovek Hz až jednotek kHz. V jiných oblastech použití adaptivní optiky však zpravidla postačují nižší opakovací frekvence a někdy je i kompenzována pouze aberace statická – v čase neměnná.
Pro adaptivně optický systém jsou tedy zapotřebí tři základní komponenty. Korektor vlnoplochy, který opravuje vlnoplochu světla tak, aby byly aberace v ní obsažené efektivně eliminovány. Senzor vlnoplochy, který měří aberace optické vlny v dostatečné kvalitě a s dostatečnou rychlostí a zajišťuje signál pro zpětnou vazbu korektoru. V neposlední řadě je potom potřeba řídicí systém, který zprostředkovává zpětnou vazbu mezi senzorem vlnoplochy a korektorem vlnoplochy a který má zásadní vliv na výsledné vlastnosti adaptivní smyčky. Pojďme se nyní podívat na jednotlivé prvky ve větším detailu.
Korektory vlnoplochy
Během 70. a 80. let 20. století bylo dosaženo pokroku v oblasti technologie korektorů vlnoplochy, které v té době byly představovány téměř výhradně deformovatelnými zrcadly [2] (Deformable Mirror – DM). Pokud se optická vlna odráží od zrcadla s deformovaným povrchem, je do její fáze vnesen profil úměrný tvaru povrchu zrcadla. Princip modulace fáze optické vlny deformovatelným zrcadlem je také dobře patrný z obr. 2. Uvědomme si, že míra deformací vlnoplochy (odchylky od rovinnosti) je v řádu několika mikrometrů, zatímco rozměr deformovatelného zrcadla je makroskopický, tzn. centimetry. Proporce deformací zrcadla i vlnoplochy na obr. 2 jsou tedy značně zveličené, aby byly vůbec patrné.

Obr. 2 Modulace vlnoplochy deformovatelným zrcadlem, směr šíření optické vlny je znázorněn šipkami. a) Vlna s poškozenou vlnoplochou (prostorovou fází) dopadá na deformovatelné zrcadlo, které je nastaveno ke kompenzaci vady vlnoplochy. b) Vlna se odráží na deformovaném povrchu zrcadla, přičemž je vlně vtisknut fázový profil odpovídající dvojnásobku výchylky deformovatelného zrcadla ve směru optické osy. c) Od zrcadla je odražena vlna s vyhlazenou vlnoplochou.
Deformovatelná zrcadla prošla dlouhým vývojem a v současnosti je dělíme podle typu jejich geometrie a technologie aktuátorů, které zprostředkovávají vlastní deformace. V prvním případě se užívá rozdělení na deformovatelná zrcadla segmentovaná a spojitá.
Segmentovaná DM sestávají z jednotlivých rovinných segmentů, jež jsou typicky hexagonálního či trojúhelníkovitého tvaru. Hojně se využívají pro astronomická pozorování nebo jiné aplikace přesného zobrazování, například v mikroskopii. Obecně mezi výhody segmentované geometrie patří veliký dynamický rozsah a nezávislost jednotlivých segmentů zrcadla, stejně jako možnost konstrukce velkých polí segmentů. Naopak nevýhodou takových zrcadel je pronikání světla mezi segmenty a nevyhnutelná difrakce záření na hranách jednotlivých segmentů. Oba jevy vedou k úbytku intenzity opravované vlny v řádu jednotek % a u pravidelných aktuátorových polí (což je naprostá většina případů) také ke vzniku difrakčních maxim. S těmi je nutno počítat v návrhu a eliminovat je například vhodně umístěnou clonou. Pro určité aplikace mohou však tyto aspekty působit vážnější problémy, které použití segmentovaných deformovatelných zrcadel znemožňují. Jednou z takových oblastí jsou například vysokovýkonové lasery, kde světelný výkon pronikající mezi segmenty může způsobit i zničení celého zrcadla. Pro takové aplikace je potom výhodné použít druhý typ geometrie – deformovatelná zrcadla se spojitou odraznou plochou.
Spojitá deformovatelná zrcadla byla zpočátku rozvíjena především ve dvou základních variantách, lišících se geometrií umístění aktuátorů [3]. Prvním typem jsou deformovatelná zrcadla pístová, jež používají tenkou vrstvu substrátu (typicky skla), která je opatřena odraznou vrstvou a která je současně deformována pístovými aktuátory připevněnými k její zadní straně (viz obr. 3a). Druhým typem jsou deformovatelná zrcadla monolitická, jež používají jednu kompaktní kompozitní vrstvu, rozdělenou pouze polem přiložených elektrod a fungující celou jako aktuátor v rovině povrchu deformovatelného zrcadla (viz obr. 4).

Obr. 3 Pístové deformovatelné zrcadlo: a) Jednoduché schéma principu funkce pístového deformovatelného zrcadla. b) Příklady aktuátorů používaných v pístových DM. c) Fotografie pístového deformovatelného zrcadla s 52 aktuátory na bázi lineárních motorů od firmy ISP System. Zrcadlo je opatřeno vysokoreflexní multivrstvou pro záření okolo 1 mm, která je pro viditelné záření průhledná a umožňuje tak spatřit aktuátory připevněné k zadní straně skleněného substrátu.
Pístová DM používají pro modulaci svého odrazného povrchu pístové aktuátory založené na různých principech (stejné se používají i u segmentovaných zrcadel). Mezi nejběžnější patří piezoelektrické aktuátory (piezo-stack) používající piezoelektrický materiál (nejčastěji PZT) ve formě štosu opačně orientovaných (polarizovaných) vrstev, které jsou proloženy elektrodami. Po přiložení napětí na elektrody dojde k prodloužení či smrštění celého štosu. Tato geometrie aktuátoru umožňuje použití řádově nižších napětí, než kdyby byly vyrobeny z jednoho kusu piezoaktivního materiálu. I tak jsou však napětí nutná k ovládání takových zařízení v řádu stovek voltů až kilovoltů. Dalším běžným typem aktuátorů jsou elektrodynamické aktuátory (voice coils) v principu stejné jako kmitací cívky v reproduktorech [4]. Aktuátor funguje na principu generace Lorentzovy síly, která je úměrná proudu protékajícím cívkou aktuátoru. Dále jsou coby písty používány také lineární motory, hydraulické či elektrostrikční aktuátory a další [5]. Každý typ atuátoru má své charakteristiky a každý se hodí pro jinou aplikaci. Například zrcadla určená pro kompenzaci atmosférických turbulencí potřebují především aktuátory s rychlou odezvou. Z uvedených přichází v úvahu piezoelektrický, elektrostrikční nebo elektrodynamický typ. Naopak u deformovatelných zrcadel určených pro statickou korekci optických vad zobrazovacích systémů je žádána především vysoká stabilita a opakovatelnost a užití najdou hydraulické aktuátory, lineární motory a další typy.
Druhou nejběžnější rodinou deformovatelných zrcadel jsou deformovatelná zrcadla monolitická, která používají piezoaktivní materiál ve formě desky, na kterou je přímo připevněn substrát s odraznou vrstvou. Tato DM se dále dělí na zrcadla monomorfní a bimorfní podle toho, je-li užito jednoho plátu piezoaktivního materiálu. V případně použití jednoho plátu piezoaktivního materiálu se hovoří o monomorfní geometrii, pokud se použijí pláty dva (opačně orientované), mluví se o geometrii bimorfní. Obecně má bimorfní geometrie podstatně větší potenciál co do míry deformace odrazné vrstvy a je tak v současnosti dominantní technologií monolitických zrcadel. Monomorfní technologie má nicméně stále význam v případech, kdy záleží především na přesnosti malých deformací spíše než na jejich absolutní hodnotě. Jednu z takových aplikací představuje například užití deformovatelného zrcadla uvnitř laserového rezonátoru, kde výchylky řádu jedné až dvou vlnových délek jsou dostatečné a záleží především na přesnosti a stabilitě užitého zrcadla [6]. Srovnání principu monomorfního a bimorfního deformovatelného zrcadla je na obr. 4.

Obr. 4 Monolitická deformovatelná zrcadla: a) Jednoduché schéma vrstev monomorfního zrcadla. Substrát je tvořen většinou tenkou vrstvou skla, které je deformováno deskou piezoaktivního materiálu obloženého z jedné strany společnou elektrodou a ze strany druhé polem elektrod. b) Jednoduché schéma bimorfního deformovatelného zrcadla. Substrát s odraznou vrstvou je deformován dvěma deskami piezoaktivního materiálu, které jsou vzájemně opačně orientované, obložené společnými elektrodami a proložené polem elektrod. c) Tvar a rozložení elektrod/aktuátorů pro bimorfní deformovatelné zrcadlo. Foto je převzaté z webových stránek Evropské jižní observatoře [7].
Pokud je na některou elektrodu v poli přivedeno napětí, je piezo vrstva lokálně smrštěna či roztažena
(dle polarity napětí). Tak je vytvořeno lokální zakřivení povrchu deformovatelného zrcadla v místě elektrody. Pokud se jedná o bimorfní typ, pak je vždy jeden z disků lokálně roztažen a druhý lokálně smrštěn, což vede k silnější odezvě v podobě lokálního zakřivení reflexního povrchu zrcadla. Monolitická deformovatelná zrcadla jsou v porovnání s pístovými typicky výrazně levnější a díky absenci potřeby robustního rámu pro uchycení aktuátorů, jsou kompaktní a lehká. Dále jsou relativně nenáročná na řídicí napětí, které se typicky pohybuje v rozmezí nízkých stovek voltů a jejich odezva je typicky velice rychlá v řádu kHz. To umožňuje jejich použití v podstatě ve všech oblastech aplikací adaptivní optiky.
Výše popsané typy DM patří mezi nejstarší návrhy a dnes jsou považovány za tradiční. Za dobu jejich vývoje bylo navrženo množství více či méně úspěšných alternativ. Za zmínku stojí především dva. Zaprvé jde o DM membránového typu, která využívají elektrostatických sil pro deformaci reflexní membrány. Vzhledem k charakteru tohoto druhu zrcadel je jejich odezva typicky v řádu desítek milisekund a je možné je použít pouze pro nízkoenergetické optické svazky. Druhým a poměrně novým typem deformovatelných zrcadel jsou potom litograficky vyráběná DM, často označovaná jako MEMS (Micro Electro-Mechanical Systems) DM, která jsou v poslední době velice populární. Tato deformovatelná zrcadla těží z pokroku litografických technologií, co se týče složitosti mikrostruktur a jejich integrace, když nabízejí až několik tisíc aktuátorů na oblasti řádově ~100 mm2. Taková deformovatelná zrcadla poskytují obrovské prostorové rozlišení při vysokých opakovacích frekvencích, avšak zdvih aktuátorů je poměrně omezený a lze je použít pouze ve svazku s relativně nízkou energií. Uplatnění nacházejí především v astronomii [8–10] či v mikroskopii [11]. Jednoduché schéma principu dvou zástupců takových zrcadel jsou na obrázku 5 včetně fotografií komerčně dostupných řešení.
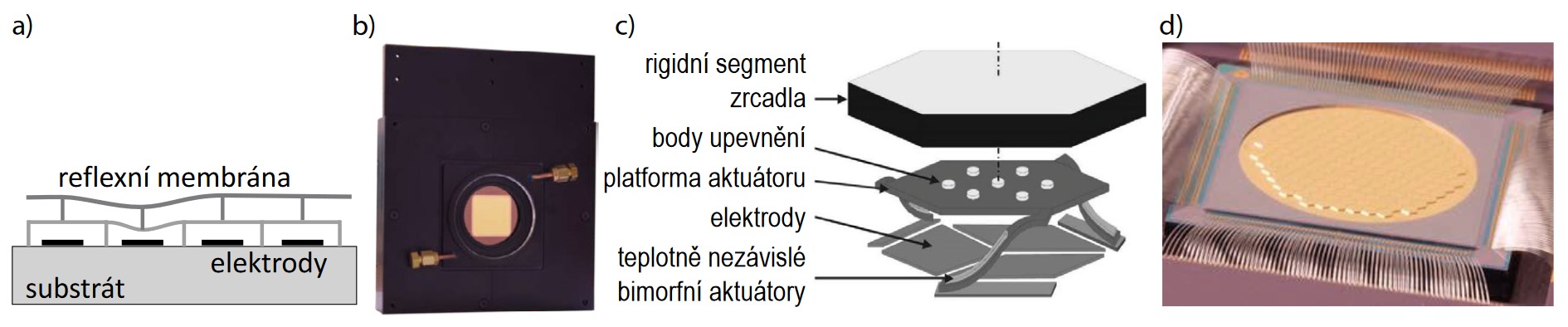
Obr. 5 MEMS DM: a) Princip deformace kontinuální reflexní membrány vyvinutý firmou Boston Micromachines. b) Foto deformovatelného zrcadla 4K DM firmy Boston Micromachines dostupné na stránkách firmy [12]. c) Schéma MEMS aktuátoru segmentovaného deformovatelného zrcadla vyvinutý firmou Iris AO. d) Foto deformovatelného zrcadla PTT489DM firmy Iris AO. Převzato z [8].
Kromě deformovatelných zrcadel existují i jiné typy fázových korektorů. Jsou to především fázové korektory ve formě adaptivních čoček a na bázi kapalných krystalů, u kterých bylo zejména v poslední době docíleno značného pokroku. Využití kapalných krystalů v optice se vesměs děje v podobě tzv. prostorových modulátorů světla (Spatial Light Modulator – SLM), které mohou být jak transmisní, tak reflexní, mohou vykazovat až 98% míru zaplnění plochy pixely (fill-factor) a nabízet prostorové rozlišení v řádu milionů pixelů. Technologie kapalných krystalů pokročila díky jejímu využití v zobrazovací technice, kdy narostla především míra integrace a koncentrace pixelů v displejích. V současnosti nejpoužívanějším typem SLM jsou hlavně reflexní zařízení založená na technologii LCoS (Liquid Crystals on Silicon). Ve srovnání s deformovatelnými zrcadly představují prostorové modulátory světla levný a pohodlný způsob diskrétní modulace fáze, který je velice dobře integrovatelný. Nevýhodou je poměrně malý fázový zdvih, který typicky dosahuje hodnoty jedné až dvou vlnových délek, a nevyhnutelná generace difrakčních řádů vlivem přítomnosti periodické struktury. Kvůli poměrně nízkému prahu poškození nelze zařízení SLM použít například ve výkonových částech laserů a využití tak nacházejí především v zobrazovacích systémech.
To platí i pro čistě transmisní fázové korektory ve formě adaptivních čoček. Původní ideou za tímto adaptivním prvkem byla schopnost spojité změny dioptrické síly pro kompenzaci dynamicky se měnící aberace defokusace, která je běžně jedním z hlavních přispěvatelů do celkové aberace optické vlny. Bylo demonstrováno několik typů adaptivních čoček na bázi kapalných krystalů nebo tvarovatelné kapalinové komory. V nedávné době byly představeny i transmisní adaptivní elementy schopné kompenzace vyšších řádů aberací, jako je koma, astigmatismus a sférická vada. Pro vytvoření aktuátorů uvnitř apertury korektoru jsou použity buď bimorfní aktuátory na vnějším okraji apertury [13], nebo lze použít elektrostatické aktuátory s transparentními elektrodami [14]. Zjednodušené schéma některých typů adaptivních čoček je na obrázku 6.

Obr. 6 Technologie adaptivních čoček: a) Adaptivní čočka založená na kapalných krystalech a odporové průhledné elektrodě, podle návrhu Naumova [15]. b) Kapalná adaptivní čočka podle návrhu Markse [16]. Změna optické síly čočky se provádí pomocí připojené stříkačky s kapalinou čočky. c) Adaptivní čočka schopná generace a korekce vyšších řádů aberací podle návrhu Bonory [13]. Dva kruhy PZT aktuátorů umožňují ovlivnění fáze ve dvou dělených soustředných kruzích uvnitř apertury čočky. d) Adaptivní kapalinový fázový korektor podle návrhu Banerjeeho [14] na bázi technologie MEMS používající transparentní elektrody coby elektrostatické aktuátory.
Senzory vlnoplochy
Senzor vlnoplochy je zařízení, jež dokáže měřit vlnoplochu optické vlny či svazku a určit tzv. aberační funkci popisující vlnoplochu svazku. Stavíce na jednoduchých a dobře známých principech jako Foucaultův test na ostré hraně, Ronchiho nebo Hartmannův test [17], senzory vlnoplochy v zásadě transformují měření intenzity na měření prostorové fáze vlny. Některé koncepty byly známé od druhé poloviny 19. století a úspěšně se používaly pro určování kvality optických prvků v optických dílnách. Měření kvality povrchu optického prvku bylo v podstatě měřením vlnoplochy modifikované měřeným prvkem a v té době tyto metody umožňovaly určení pouze statických aberací. Teprve s příchodem rychlé elektroniky ve 20. století a uvedením záznamové technologie CCD v 70. letech bylo možno konstruovat první senzory vlnoplochy schopné měření dynamických aberací v reálném čase. První senzory vlnoplochy typicky bojovaly s omezeným výpočetním výkonem tehdejších počítačů a jejich operační prostor se běžně omezoval jen na ty nejzákladnější aberace [18]. Během 70. let minulého století bylo navrženo a vyvinuto několik druhů senzorů vlnoplochy a jejich schopnosti mohly být porovnávány [19]. Senzor založený na modifikovaném Hartmannově testu navržený Shackem a Plattem v roce 1971 [20] se během následujících deseti let ukázal jako nejjednodušší, ale i nejvhodnější a nejoblíbenější senzor pro naprostou většinu aplikací. Zkoumány však byly nadále i jiné techniky měření vlnoplochy a kromě typu Shack–Hartmann byly vyvinuty senzory založené na interferometrii s příčným zdvihem [21], senzor zakřivení vlnoplochy (curvature wavefront senzor) [22] nebo pyramidový senzor vlnoplochy [23], které se postupně staly standardními typy senzorů se specifickými vlastnostmi a dnes jsou běžně používány v metrologii, mikroskopii, astronomii, laserové technice, oftalmologii a dalších odvětvích. My si popíšeme principy alespoň několika nejběžnějších typů.
Nejpopulárnější typ – Shackův–Hartmannův senzor vlnoplochy vznikl modifikací Hartmannova testu, který spočíval ve vyhodnocení obrazu Hartmannovy masky. Ta je tvořena pravidelným polem malých děr, kterými optický svazek prochází a na detekčním zařízení tedy obraz sestává z pole světlých bodů na tmavém pozadí, jejichž pravidelné rozmístění je porušeno v závislosti na aberacích zobrazovacího systému. U Shackova– Hartmannova senzoru vlnoplochy je Hartmannova maska nahrazena pravidelným polem čoček a detektor je umístěn do jejich ohniskové vzdálenosti. Optický svazek je tak efektivně rozdělen na podoblasti dané rozdělením čoček čočkového pole a v každé podoblasti je zaznamenávána odchylka fokusu od středu čočky (optické osy). Tato odchylka je přímo úměrná lokálnímu sklonu vlnoplochy optické vlny v daném místě a analýzou těchto lokálních sklonů ve všech podoblastech je zpětně rekonstruována vlnoplocha svazku. Rozměry čoček čočkového pole jsou typicky v rozmezí 100 µm až 1 mm a v době svého vzniku představovala výroba dostatečně kvalitních čoček v tomto rozměru zásadní problém. Rozměry čoček čočkového pole určují dynamický rozsah a prostorové rozlišení senzoru. Zjednodušené schéma principu Shackova–Hartmannova senzoru vlnoplochy je znázorněno na obr. 7 spolu s ukázkou signálu na čipu kamery a fotografií senzoru daného typu.

Obr. 7 Shackův–Hartmannův senzor vlnoplochy: a) Zjednodušené schéma principu detekce sklonu vlnoplochy v jednotlivých podoblastech daných rozložením čočkového pole. b) Typický obraz na světločivném čipu senzoru, který bývá často označován jako Hartmanngram. c) Foto apertury jednoduchého Shackova–Hartmannova senzoru vlnoplochy.
Vůbec nejstarší a i v současnosti velmi oblíbenou technikou měření fáze optické vlny je interferometrie. V optických dílnách byla a stále je běžně používána pro kontrolu kvality optických prvků. Interferometr využívá vlastnosti koherence záření k odhalení velmi malých rozdílů ve vlnoplochách interferujících svazků. V nejjednodušším uspořádání se nechají interferovat dva svazky, z čehož jeden má dokonale rovinnou vlnoplochu a interferenční obrazec potom přímo ukazuje vlnoplochu druhého svazku. Získávání dokonale rovinné vlnoplochy referenčního svazku je však velmi problematické a interferující svazky mají rozdílné optické dráhy. Tento přístup je použit v interferometrech typu Mach–Zehnder či Michelson. Druhou možnost představují interferometry se společnou dráhou, jako jsou interferometry typu Fizau, Sagnac anebo interferometr s radiálním či příčným zdvihem. V tomto pojetí mají oba interferující svazky stejnou vlnoplochu, což sice vnáší požadavek na důkladnější analýzu interferogramu, ale výrazně se zjednodušuje experimentální uspořádání a zvyšuje robustnost metody. Právě interferometrie s příčným zdvihem je technologií, která se z popsaných přístupů dostala nejdál co do propracovanosti, komercializace a dostupnosti.
U interferometru s příčným zdvihem je analyzovaný svazek rozdělen na dva pomocí děliče svazku a tyto se následně nechají interferovat. Děličem svazku může být například planparalelní sklíčko, jehož tloušťka navíc udává velikost příčného zdvihu (posuvu mezi svazky). V překryvu obou svazků vzniknuvší interferogram je úměrný lokálnímu sklonu vlnoplochy neboli její první derivaci ve směru zdvihu. V moderních interferometrech s příčným zdvihem se nechává interferovat větší počet svazků, přičemž pro jejich získání se obvykle použije difrakční mřížky. Funkce jak třívlnového [24], tak čtyřvlnového [25] interferometru s příčným zdvihem byla demonstrována okolo přelomu tisíciletí (obr. 8) a druhý typ se dnes běžně používá například v metrologii či laserových systémech. Hlavní výhodou této technologie oproti Shackovu–Hartmanovu senzoru vlnoplochy je podstatně větší prostorové rozlišení a dynamický rozsah při zachování vysoké citlivosti měření. Nevýhodou je naopak potřeba silnějšího signálu a výpočetní náročnost, která omezuje rychlost senzoru řádově na desítky hertzů a nehodí se tak pro aplikaci v astronomii.

Obr. 8 Interferomerie s příčným zdvihem: a) Dvousvazková interferometrie na planparalelním sklíčku. b) Čtyřsvazková interferometrie na dvoudimenzionální mřížce. c) Foto komerčního senzoru vlnoplochy na bázi čtyřvlnné interferometrie s příčným zdvihem.
Kromě senzorů využívajících speciálního optického elementu existují i výpočetní metody získání vlnoplochy analýzou intenzitního profilu svazku při jeho šíření. Většinou se měří intenzitní profil ve dvou rovinách podél optické dráhy svazku, které jsou od sebe vzdáleny typicky mm až cm. Podle zvolených měřicích rovin a druhu konvergence svazku mezi nimi se tyto senzory dělí na senzory křivosti vlnoplochy (curvature senzors), senzory založené na analýze určité fázové diverzity (phase diversity) a senzory využívající iterační algoritmy k nalezení přibližného tvaru vlnoplochy (phase retrieval). Všechny tyto přístupy jsou obecně výpočetně náročné, a přestože použité mechanismy byly vyvinuty a jsou známy již od 80. let 20. století, jejich hlavní rozvoj a širší aplikace přicházejí teprve nyní. Nicméně s tím, jak se neustále navyšuje a zlevňuje dostupný výpočetní výkon, se dá očekávat pokračování nástupu těchto senzorů.
Řízení adaptivního systému
Řídicí systém zprostředkovává vazbu mezi korektorem vlnoplochy a senzorem poskytujícím zpětnou vazbu a zajišťuje tak činnost celého adaptivně-optického aparátu. Ačkoliv existují i metody řízení, které nekladou žádné nároky na znalost fázového korektoru, je jejich použití spíše výjimečné a výkonnost takových systémů bývá horší než u metod, které takovou charakterizaci vyžadují. K charakterizaci fázového korektoru je zpravidla třeba použít senzoru vlnoplochy a změřit vliv každého aktuátoru na fázi optické vlny (tzv. odezvové funkce). U vhodně vyrobeného fázového korektoru platí pro jeho odezvové funkce princip superpozice a výsledný fázový profil je tedy lineární kombinací vlivů jednotlivých aktuátorů. Pro známý signál na korektoru vlnoplochy tak tedy lze určit jednoduše výsledný vliv na vlnoplochu svazku. Řídicí systém potom typicky řeší opačnou úlohu: pro zjištěné aberace je třeba najít vhodný signál pro fázový korektor tak, aby je co nejpřesněji kompenzoval (opravoval na rovinnou či kulovou vlnu).
Podle geometrie konkrétního systému adaptivní optiky lze jeho řídicí systém zařadit do jednoho ze tří základních schémat, jež jsou ideově znázorněna na obrázku 9.

Obr. 9 Schémata činnosti adaptivně optického systému: a) Smyčka se zpětnou vazbou neboli uzavřená smyčka. b) Smyčka bez zpětné vazby neboli otevřená smyčka. c) Smyčka se zpětnou vazbou, kterou však nezajišťuje senzor vlnoplochy, ale obecně jiný druh senzoru.
Původní návrh adaptivního systému počítá s použitím fázového korektoru ve smyčce se zpětnou vazbou poskytovanou senzorem vlnoplochy (viz obr. 9a). V tomto uspořádání je signál pro senzor vlnoplochy vydělen ze svazku až po jeho průchodu fázovým korektorem. Senzor vlnoplochy tedy měří zbytkové aberace vlny po její opravě fázovým korektorem a tyto je možné opravit v dalším kroku uzavřené smyčky. Uzavřená smyčka tak v každé své iteraci zpřesňuje korekci a je výrazně tolerantnější k nedokonalostem charakterizace fázového korektoru než ostatní případy. Někdy nelze toto uspořádání použít v důsledku prostorových omezení, specifického prostředí apod. Potom je možno adaptivní systém provozovat v režimu otevřené smyčky (obr. 9b), kdy jsou aberace vlny měřeny před jejich průchodem fázovým korektorem. V takovém případě je nutné se spolehnout na dokonalou charakterizaci fázového korektoru, což ovšem bývá možné splnit překvapivě často. Nakonec zmíníme případ, kdy není z nějakého důvodu možné použít senzor vlnoplochy, nebo je to nevýhodné. Řídicí systém potom pracuje se signálem jiného senzoru – typicky kamery, měrky výkonu, kvadrantového detektoru apod. Tento způsob řízení většinou užívá iterativní algoritmy, které konvergují pomaleji, a proto je toto uspořádání vhodné ke kompenzaci především statických aberací.
Závěrem
Adaptivní optika je dnes dobře etablovanou technologií, která užívá širokou škálu zařízení a metod řízení. Ty výše uvedené patří mezi nejběžnější a dobře ukazují typ technologií použitelných pro řízení vlnoplochy světla. Souhrnný popis všech možných řešení však určitě nebyl cílem tohoto článku. Vliv adaptivního řízení fáze světla na kvalitu zobrazování je nesporný, což potvrzuje i jeho hojné využití v široké oblasti vědy a techniky. Se zlevňováním adaptivních komponent navíc bude stále častější. Do budoucna se dá předpokládat další výrazný nástup technologií a technik spoléhajících na výpočetní výkon, což by mohlo znamenat další výrazné zlevnění a zvýšení flexibility aplikace celého oboru.
Reference
[1] H. W. Babcock: „The Possibility of Compensating Astronomical Seeing“, Publications of the Astronomical Society of the Pacific 65, 229–236 (1953).
[2] L. Marquet, J. Hardy: „Historical Review of Adaptive Optics Technology“, Proc. SPIE 0141, 0141–9 (1978).
[3] R. H. Freeman, J. E. Pearson: „Deformable mirrors for all seasons and reasons“, Appl. Opt. 21, 580–588 (1982).
[4] R. Arsenault a kol.: „A deformable secondary mirror for the VLT“, Proc. SPIE 6272, U302-U313 (2006).
[5] P. Y. Madec: „Overview of deformable mirror technologies for adaptive optics and astronomy“, Proc. SPIE 8447, 844705-18 (2012).
[6] S. Verpoort, U. Wittrock, S. Olivier, T. Bifano, J. Kubby: „Novel unimorph deformable mirror with monolithic tip-tilt functionality for solid state lasers“, MEMS Adaptive Optics V., Proceedings Paper 7931, 793107 (2011).
[7] European Southern Observatory – Adaptive optics. ESO. Dostupné na (25. 10. 2016): http://www.eso.org/sci/facilities/develop/ao/sys/mad.html
[8] M. A. Helmbrecht, M. He, C. J. Kempf, M. Besse: „MEMS DM development at Iris AO, Inc.“, Proc. SPIE 7931, 793108 (2011).
[9] T. Bifano: „Adaptive imaging MEMS deformable mirrors“, Nature Photonics 5, 21–23 (2011).
[10] B. Macintosh a kol.: „First light of the Gemini Planet Imager“, Proc. Nat. Acad. Sci. USA 111, 12661–12666 (2014).
[11] X. Tao a kol.: „Adaptive optics confocal microscopy using direct wavefront sensing“, Opt. Lett. 36, 1062–1064 (2011).
[12] Bostor Micromachine Corporation: „High actuator count deformable mirrors“, Ed. 2016.
[13] S. Bonora a kol.: „Wavefront correction and high-resolution in vivo OCT imaging with an objective integrated multi-actuator adaptive lens“, Opt. Express 23, 21931–21941 (2015).
[14] K. Banerjee, P. Rajaeipour, C. Ataman, H. Zappe: „Optofluidic adaptive optics“, Appl. Opt. 57, 6338–6344 (2018).
[15] A. F. Naumov, M. Y. Loktev, I. R. Guralnik, G. Vdovin: „Liquid-crystal adaptive lenses with modal control“, Opt. Lett. 23, 992–994 (1998).
[16] R. Marks, D. L. Mathine, G. Peyman, J. Schwiegerling, N. Peyghambarian: „Adjustable fluidic lenses for ophthalmic corrections“, Opt. Lett. 34, 515–517 (2009).
[17] D. Malacara (ed.): Optical Shop Testing. Wiley, Hoboken 2007.
[18] E. M. Granger: „Wavefront Measurements from a Knife Edge Test“, Proc. SPIE 0429, 174–177 (1983).
[19] J. M. Geary a kol.: „Comparison of wavefront-senzor techniques“, Proc. SPIE 1776, 58–72 (1992).
[20] R. V. Shack, B. C. Platt: „Production and use of a lenticular Hartmann screen“, in The 1971 Spring Meeting of the Optical Society of America. Tuscon, Arizona. Ed. R. J. Collier, 5 April 1971. Vol. 61, no. 5, s. 656– 660, J. Opt. Soc. Am.
[21] J.-C. Chanteloup, F. Druon, M. Nantel, A. Maksimchuk, G. Mourou: „Single-shot wave-front measurements of high-intensity ultrashort laser pulses with a three-wave interferometer“, Opt. Lett. 23, 621–623 (1998).
[22] F. Roddier: „Curvature sensing and compensation: a new concept in adaptive optics“, Appl. Opt. 27, 1223–1225 (1988).
[23] R. Ragazzoni: „Pupil plane wavefront sensing with an oscillating prism“, J. Mod. Opt. 43, 289–293 (1996).
[24] J. Primot: „Three-wave lateral shearing interferometer“, Appl. Opt. 32, 6242–6249 (1993).
[25] S. Velghe, J. M. Primot, N. Guérineau, M. Cohen, B. Wattellier: „Wave-front reconstruction from multidirectional phase derivatives generated by multilateral shearing interferometers“, Opt. Lett. 30, 245–247 (2005).